2.5 Model a Hybrid System
In this section, we will learn how to use Cyclone to verify a simple hybrid system. A hybrid system has both continuous and discrete dynamic behavior and it can both flow and jump. Typically, flow is described by some differential equations and jumps are modeled as a finite state machine.
To model a hybrid system, we will establish a model of physics and model of software. The physics model describes continuous dynamics and software model describes discrete dynamics.
Bouncing Ball
A classic example of a hybrid system is the bouncing ball (A system with impact). A ball is dropped from a predefined height. It then hits the ground (after a certain time), loses some energy and bounces back into the air and starts to fall again.
Its physical model can be described using the following differential equation:
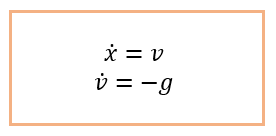
where v is our velocity (with respect to time t), x is the height, and g is the gravitational acceleration 9.81/ms2. As time (t) goes by, the ball moves closer (x) to the ground and eventually hits the ground when x=0. It then dissipates its energy and starts to bounce back. This behavior is modeled using the following equation:
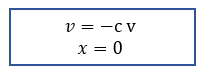
-c v accounts for the loss of energy due to the ball's deformation, where c ∈[0,1] is a constant.
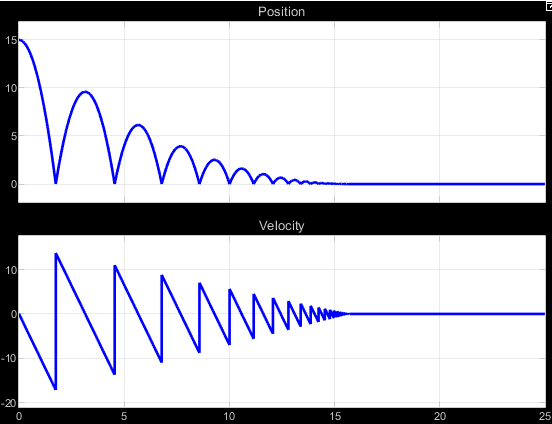
The following graphs show the position of the ball and its velocity when time passes.
Now, We can use a finite state machine to describe discrete states of a bouncing ball. This state machine is as follows:
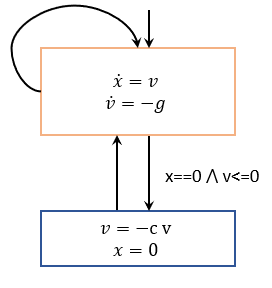
Further, the invariant here is no matter which state we are in our x (the height) should always stay positive (>=0). Hence, we have our Cyclone spec:
graph Verify {
real x where x >= 0; //height
real v; //velocity
real t where t > 0; //time
const real G=9.81; //gravity acceleration
real c where c >= 0 && c<=1; //coefficient of energy loss
normal start state Fall{
x = x + v * t;
v = v - G * t;
}
normal state Bounce{
v = -c * v;
x = 0;
}
trans t1 { Fall -> Fall }
trans t2 { Fall -> Bounce where (x<=0 && v<=0);}//guard
trans t3 { Bounce -> Fall }
invariant BouncingBallInv { x>=0; }//state invariant
}
Next, we can just specify our goal section to ask Cyclone to check for specific traces of a counter-example.
goal {
check for 2,3,4,5 reach (Fall,Bounce)
}
Execution Result
Press 'run' to execute the code and see checking results.
Execution server didn't supply any information
URL: /server